![]()
Data сonverter
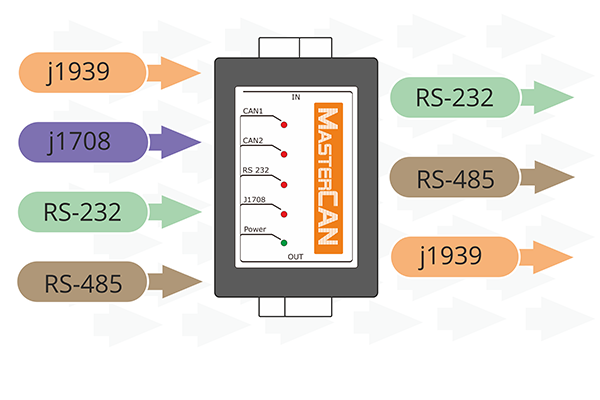



MasterCAN data converter is an interfacing and transformation tool between CAN J1939/71, J1708 (SAE J1587) and RS-485/232 (Modbus RTU) communication standards, designed for vehicle telematics (GPS vehicle tracking) and industrial automation (IIoT).
MasterCAN data converter is used for integration sensors and peripherals with different interfaces into a single telematics and/or remote management system, filtering J1939/71 and Modbus messages and simplifying configuration of a terminal unit – tracker, controller, display.
Different models of MasterCAN data converter are available – see Model list below.
Tasks
- Convert data between CAN J1939, RS-232, RS-485 interfaces
- Translate messages of J1939/71, FMS, ISObus, J1708, Modbus RTU standards
- Transform parameters from J1708 bus to J1939/71 and RS-232 (ASCII, Modbus RTU)
Features of MasterCAN data converter
- Versatility – can be used for vehicle telematics, IIoT applications, industrial automation projects
- Flexible configuration of input/output SPN, Modbus registers, data baud rate using service software
- Safe CAN bus and J1708 bus reading using contactless readers (optional)
- Conformity with automotive standards of the EU and EAEU
- Power supply from on-board electrical network without extra power adapters
MasterCAN data converters for vehicle telematics

1) Simultaneous data reading from J1708 and CAN buses
MasterCAN reads messages from J1587 and J1939 buses, filters and merges data into single J1939/71 messages, and transfers the received data via the output CAN-interface. The feature is used for vehicles made by Volvo, Renault, John Deere, American automotive manufacturers, and other machinery equipped with J1708 (SAE J1587) data bus.
2) Vehicle data interface for receiving FMS messages
MasterCAN scans the CAN bus, selects FMS messages and sends them to telematics unit. Filtering FMS messages allows reducing data load tracker’s CAN-port and amount of data transmitted to telematics server, thus simplifying configuration of the entire telematics system. In addition, MasterCAN generates Telematics messages from those found in CAN J1939 / 71 – Telematics messages contain the most important operation parameters for telematics and saves time on CAN bus parsing.
3) Transforming CAN J1939 to RS-232 or RS-485
MasterCAN transforms messages received via CAN and J1708 buses into HEX, text data or Modbus RTU protocol and transmits via RS-232 or RS-485 interfaces. This feature is used for GPS-tracker, telematics boxes or other terminal devices where there is no available CAN-port for connecting CAN bus.
4) Counter of total fuel consumption from engine start
Often there is no total engine fuel data in J1939/71 bus. But this data is required for monitoring fuel consumption. MasterCAN data converter independently calculates fuel consumption from the recent engine start using “Instant fuel rate” parameter (SPN 183) and transmits the Counter to telematics unit.
5) Combining data from two CAN buses
Reading and transmitting messages simultaneously from two CAN J1939 buses to one CAN-port of telematics unit could lead to address conflict. Telematics unit will be receiving values of the very same parameter from two unrelated ECUs that have the same address (SA), that will result in receiving incorrect readings. MasterCAN is able to transmit FMS messages without changing original address, and substitute network address with its own in Telematics messages.
MasterCAN data converters for IIoT and industrial automation

1) Integrate a controller into telematics system (IIoT)
MasterCAN RS2CAN reads data via Modbus RTU protocol, for example, from a diesel genset controller, and converts the received data into CAN J1939 / S6 messages for transmission to a terminal device or other equipment with CAN interface. Using MasterCAN service software, it is possible to select Modbus registers to be read out and into which J1939 messages the data should be converted.
2) Data transfer from telematics equipment to a controller via Modbus RTU
MasterCAN CAN2RS receives messages from the sensors of the telematics system, and stores received data to registers according to the Modbus RTU protocol. A terminal device, for example, a router or a diesel generator controller, reads these messages for further processing, transmission to SCADA or display.
3) Integration of telematics equipment with different interfaces into a single network
MasterCAN transforms signals of telematics system equipment with different interfaces – level sensors, fuel flow meters, temperature and humidity sensors and other IIoT devices – and integrates the data into a single network according to the CAN J1939/S6 standard. This allows unifing messages received by the terminal unit and simplifying the task of parsing and displaying messages on IIoT-service side.
Input interface (protocol)
Output interface (protocol)
CAN (SAE J1939)
MasterCAN CC

CAN 2.0B (SAE J1939)
Automatic scanning and parsing of FMS messages.
Automatic fuel consumption calculation using CAN fuel rate data.
Generating and sending special Telematics messages.
Vehicle data interfacing from CAN data bus (SAE J1939).
CAN (SAE J1939)
MasterCAN C 232/485
 MasterCAN C 232/485")
RS-232
RS-485 (ASCII/Modbus RTU/DUT-E COM (extended LLS))
Automatic scanning and parsing of FMS messages from the onboard CAN bus (SAE j1939/71) into RS-232 and RS-485 interfaces (ASCII / Modbus RTU / DUT-E COM).
Automatic fuel consumption calculation using CAN fuel rate data.
Vehicle data interfacing from CAN data bus (SAE J1939).
CAN (SAE J1939)
J1708 (SAE J1587)
MasterCAN V-GATE
")
CAN 2.0B (SAE J1939)
RS-232 (ASCII/Modbus RTU/DUT-E COM (extended LLS))
Automatic scanning and parsing of FMS messages from CAN (SAE j1939/71).
Automatic fuel consumption calculation using CAN fuel rate data.
Generating and sending special Telematics messages, as well as for transfer of messages into RS-232 interface (ASCII / Modbus RTU / DUT-E COM).
Vehicle data interfacing from CAN data bus (SAE J1939) and J1708 data bus (SAE J1587).
RS-485/232 (Modbus RTU)
MasterCAN RS2CAN

CAN (SAE j1939/71)
Selection of registers for reading/storing data according to Modbus RTU protocol.
Flexible configuration of output SPNs (CAN bus parameters) from 10,000+ database.
CAN (SAE j1939/71)
MasterCAN CAN2RS

RS-485 (Modbus RTU)
Automatic scanning of available messages in CAN j1939 data bus.
Flexible configuration of input SPNs (CAN bus parameters) from 10,000+ database.
Selection of registers for reading/storing data according to Modbus RTU protocol.
MasterCAN configuration
Download ServiceS6 MasterCAN




Configuring MasterCAN data converters using service software
MasterCAN configuration
Configuring MasterCAN CC, C232/485, V-GATE
Input/output
j1939/S6 interface
- activate sending requests to CAN bus
- allow sending FMS and Telematics messages
- select network address (SA)
Output interfaces
RS-232 or RS-485
- Select output data type – Modbus RTU, HEX., text (ASCII), DUT-E COM (extended LLS)
- Select data transmission interval and baud rate for RS-232 and RS-485
- Configure prefix and suffix for ASCII messages
- Configure network address (RS-485)
- Enable automatic fuel consumption calculation
Configuring MasterCAN RS2CAN, CAN2RS
Input/output interfaces
RS-232 or RS-485
- Configuring register tables for storage/reading out over Modbus RTU
- Selecting baud rate
- Selecting network address (RS-485)
Input/output
j1939/S6 interface
- Selecting SPNs (list of 10,000+ parameters) for sending/receiving data over CAN
- Activate sending requests to CAN bus
- Configuring baud rate
| Supply voltage, V | 10…45 |
| Current consumption (24 V/12 V), mA, not more than | 50/100 |
| Operating temperature, °С | -40…+85 |
| Level of casing protection | IP40 |
| Dimensions, mm, not more than | 94,5×58,5×24,5 |
| Weight, kg, not more than | 0,15 |

Frequently Asked Questions
MasterCAN data converters process data only according to
standard protocols (J1939/S6, Modbus RTU, J1587, ASCII), depending on the model.